登錄
登錄
 注冊
注冊
韓國利用透明執(zhí)行器和傳感器研發(fā)新型軟機器人
軟機器人的問世通過采用完全軟體系統(tǒng),可與任何隨機表面安全交互,同時提供出色的機械柔韌性,在機器人,可穿戴設備甚至制造工藝方面取得了巨大進步。此外,軟機器人技術的最新發(fā)展涉及透明軟致動器和傳感器的進步,這些進展使得能夠構造能夠以視覺和機械上暢通無阻的方式工作的機器人,從而協(xié)助了機器人的操作并在各個領域創(chuàng)造了更多的應用。在這方面,主要由光學透明的不可感知的硬件組件組成的不可感知的軟機器人有望在即將到來的軟機器人時代構成新的研究重點。最近,首爾國立大學Seung Hwan Ko教授團隊論述了有關擴展的不可感知的軟機器人技術的最新進展,包括不可察覺的透明軟機器人(透明的軟致動器/傳感器)和不可察覺的非透明偽裝蒙皮。討論了它們的原理,材料選擇和工作機制,以便可以探索難以察覺的軟機器人系統(tǒng)中的主要挑戰(zhàn)和觀點刊發(fā)相關題為‘‘Transparent Soft Actuators/Sensors and Camouage Skins for Imperceptible Soft Robotics’’的論文在《Advanced Materials》上。

【圖文解析】
1.引言
機器人和可穿戴設備的技術進步取決于光學和機械合規(guī)性,具體取決于它們的用途。通過利用透明執(zhí)行器和傳感器的最新進展,將其柔軟而有彈性的機械柔韌性與光學透明性相結合,可以創(chuàng)造出一類新型的軟機器人,可以稱為不可感知的軟機器人(ISR)。如圖 1所示機敏的軟機器人系統(tǒng)圖描述了ISR將主要由透明系統(tǒng)和迷彩皮膚組成。透明系統(tǒng)包含光學透明的軟致動器和傳感器,以構建別人很少見的機械交互機器人。

圖1 不可感知的軟機器人(ISR)的系統(tǒng)圖。ISR機器人領域的各種潛在應用:人類輔助設備,機器人假肢和軟臥底機器人。
2.透明軟致動器
為了使機器人能夠自由移動并與環(huán)境互動,機器人的身體需要產(chǎn)生各種運動的致動系統(tǒng)。軟致動器,直覺上是指“軟”一詞,它必須具有與常規(guī)笨重且剛性的致動器不同的,可靠地順應于任何表面的軟主體。
2.1 電熱致動器ETA
長期以來一直是原始能源的熱量一直是軟機器人技術最新發(fā)展的有效激勵手段。由于致動器內部傳遞的熱量是肉眼看不到的,因此透明的ETA可以被認為是對不易察覺的致動系統(tǒng)非常直觀和實用的方法。圖 3a會顯示一個基于LCE的透明執(zhí)行器,該執(zhí)行器由插入兩層松散交聯(lián)的LCE膜之間的薄的可拉伸蛇形電阻加熱器組成,以建立基于ETA的人造肌肉。
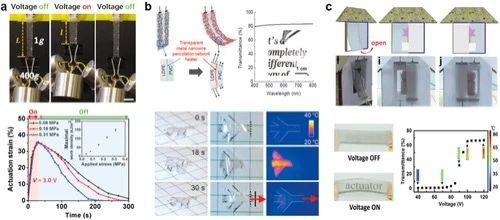
圖3 透明電熱執(zhí)行器(ETA)。a)基于熱響應液晶彈性體(LCE)的人造肌肉膜,具有可逆的驅動和熱機械性能。b)與NW加熱器和各向異性聚合物薄膜以及透明行走機器人集成在一起的雙層透明致動器,其紅外圖像相對于DC圖像具有可視化的運動效果。c)使用PW-PDMS / SACNT復合材料的透明可切換執(zhí)行器,以及在不同的溫度條件下通過施加電壓可切換的光學透明度。
2.2 介電彈性體致動器DEA
DEA是一種致動器,使用高壓驅動的強電場使夾在兩個主電極之間的電介質材料變形。在先前關于DEA的工作中,通常由碳粉或碳脂制成的順應性電極不具有光學透明性和較高的機械耐久性。
DEAS通常顯示快速致動速度,大的應變,和高的力的產(chǎn)生,近期通過凱普林格和同事的工作已經(jīng)利用這些性質在液壓擴增自愈靜電致動器實現(xiàn)使用拉鏈機構快速致動(圖 4a)。通過將聚丙烯酰胺(PAM)水凝膠注入通過熱壓兩個熱塑性薄膜形成的通道中,可以輕松制造HASEL執(zhí)行器。HASEL執(zhí)行器具有出色的執(zhí)行性能,可產(chǎn)生高達118%的應變,應變率約為7500%s-1,激勵頻率為126 Hz,比功率為156 W kg-1。HASEL執(zhí)行器的形狀可以很容易地設計成蝎尾(圖 4a,底部),類似于真實蝎尾的高速沖程,其完全卷曲后的快速驅動速度為1.26 m s-1。
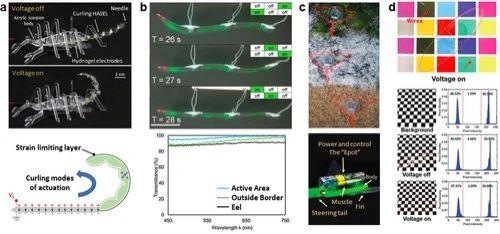
圖4 透明介電彈性體執(zhí)行器(DEA)。a)蝎子機器人中的液壓放大自修復靜電(HASEL)致動器,并描述了使用液體介電材料的拉鏈驅動DEA。b)模仿透明鰻魚的流體電極介電彈性體致動器(FEDEA),并比較FEDEA和鰻魚(小腦)的光學透明度。c)具有所有透明層和船上系統(tǒng)的電子魚,用于供電和遠程控制。d)透明的軟機器人,其具有雙軸預拉伸膜和在驅動下無光散射的表面。
2.3 替代促動
除了DEA,的ETA,還存在其他類型的透明軟的致動器的具有替代致動諸如氣動/液壓致動器,和功能性復合材料的致動器。雖然氣動致動器軟一般要求的壓縮空氣的外部源施加由所述閥系統(tǒng),它們具有高輸出力的優(yōu)勢并保持其形狀,而不額外輸入能量。由功能復合材料制成的軟促動器通常不依靠電力,而是利用諸如濕度,pH和周圍溫度等環(huán)境刺激。
除了氣動致動器,Yuk等人還介紹了液壓驅動執(zhí)行器。透明堅固的水凝膠表皮,因為液壓腔可承受1000次以上的液壓驅動操作,而不會發(fā)生泄漏或故障。由于液壓腔主要由水組成,因此所提供的執(zhí)行器在水中具有幾乎相同的光學和聲音特性,從而使整個系統(tǒng)從水生環(huán)境中消失(圖 5a)。通過這種偽裝功能,演示了透明的機器人魚,手指和抓手,顯示出了無法察覺的運動的優(yōu)勢(圖 5a,底部)。結果,由堅硬的水凝膠組成的液壓執(zhí)行器已證明在任何其他透明的軟執(zhí)行器中顯示出最高的輸出力(10 N)。
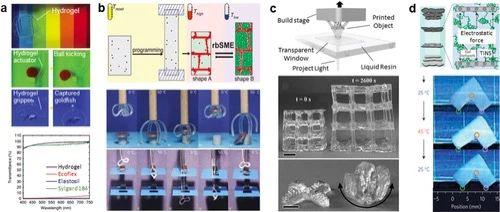
圖5 透明軟執(zhí)行器中的替代執(zhí)行類型。a)液壓執(zhí)行器及其光學特性。在水生環(huán)境中,透明的機器人魚,手指和主要由水凝膠制成的抓取器被偽裝起來,以展示出感知運動的優(yōu)勢。b)可響應的雙向形狀記憶效應(rbSME),可響應編程的溫度,并通過rbSME演示透明的軟抓手。c)離子復合水凝膠的3D打印和滲透驅動。d)靜電各向異性水凝膠的介電常數(shù)轉換和加熱/冷卻時L形水凝膠致動器的位移曲線促進了熱響應致動。
3.透明的軟傳感器
為了感測外力或發(fā)出用于控制機器人的信號,軟傳感器已經(jīng)在電子皮膚和軟機器人領域進行了許多研究。這些領域的許多同事已經(jīng)提出了各種方法,以將多種感知融入柔軟而富有彈性的特征中。
3.1啟用圖案化的透明軟傳感器
盡管材料的固有剛度通常會限制應變伸長率,但是具有極薄厚度的電子產(chǎn)品可以很好地與曲線和動態(tài)表面相接,從而在無法感知的電子皮膚功能以及機器人感知方面取得了長足的進步。通常厚度在幾微米到300 nm之間的超薄薄膜電子產(chǎn)品具有超輕和無阻礙的物理特性,建立了難以察覺的觸覺傳感器陣列和PLED,可以以皺紋或皺折的方式貼合皮膚,而不會影響性能(圖 6a) 。
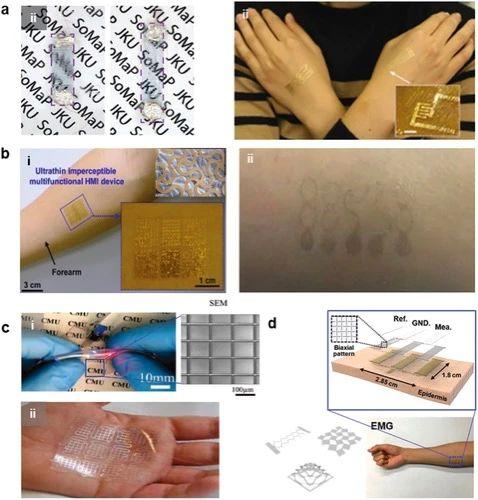
圖6 圖案化使透明的軟傳感器成為可能。
3.2本質透明的軟傳感器
在制造透明的軟傳感器時,許多導電材料(例如金屬和碳)通常會受到剛度,脆性和不透明性的限制。但是,在開發(fā)用作透明軟傳感器的本質上柔軟且可拉伸的材料方面已經(jīng)取得了很大的進步。在本節(jié)中,將討論以各種方式設計的本質透明的軟傳感器。離子蒙皮是由松散交聯(lián)的聚合物鏈制成的離子導電透明傳感器,該鏈充滿水或其他離子液體(圖 7a)。
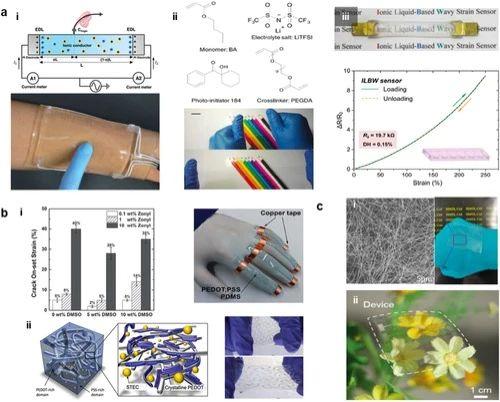
圖7 本質上透明的軟傳感器。
4 通過偽裝的假象
可編程迷彩系統(tǒng)可以成功替代透明材料。通過改變它們的皮膚顏色和形態(tài)來模仿它們的周圍環(huán)境,可能無法察覺這些結構。最早的偽裝軟機器人是由哈佛大學和國防部高級研究計劃局(DARPA)的科學家創(chuàng)建的,該機器人能夠將其膚色調整為背景,甚至隱藏在紅外區(qū)域。氣動軟機器人內部的著色元素由開放式微通道提供。如圖 8a所示,當機器人向巖石移動時,它會主動偽裝。通過將高導熱性的材料注入通道,軟機器人還具有紅外偽裝的能力。
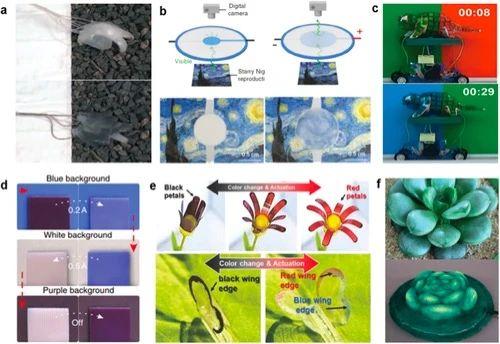
圖8 可偽裝皮膚材料的進步。a)注入顏料而偽裝的軟機。b)受頭足類動物啟發(fā)的可伸展多式聯(lián)運迷彩平臺。c)通過電沉積金和納米陣列的等離子體光譜特性,使皮膚發(fā)生主動變色。d)具有熱致變色彈性體皮膚和嵌入式液態(tài)金屬加熱器的可拉伸變色皮膚。e)仿生致動器的同時各向異性和變色致動。f)模仿周圍環(huán)境的可編程機器人組織。
5 當前的挑戰(zhàn)和觀點
透明傳感器,致動器以及可撓性皮膚的最新發(fā)展帶來了各種策略,使得集成式感知系統(tǒng)的開發(fā)成為可能,該系統(tǒng)在各種應用(如臥底操作和可穿戴輔助設備)中具有巨大潛力。 盡管最近進行了所有改進,但仍有許多實際工作要做。 我們可以預見到傳感器和執(zhí)行器的集成,通過各種化學和生物能源的自供電自動化以及通過與機器智能的集成將傳感器信號識別的新水平。 我們對不可察覺的軟機器人技術進行進一步開發(fā)的觀點將包括以下內容(圖9)。
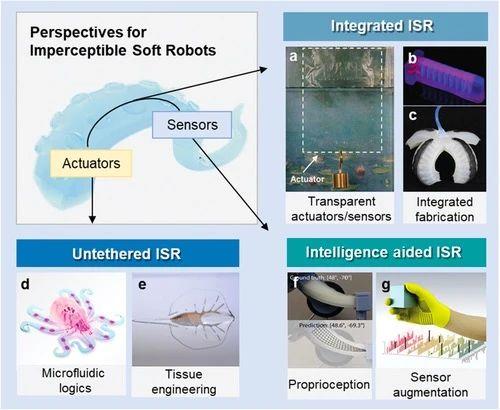
圖9 從解決當前目標到解決當前問題的不可感知的軟機器人技術(ISR)的觀點。
【陳述總結】
軟致動器和軟傳感器中新材料和設計開發(fā)的最新進展旨在通過將兩個相似的研究領域(軟機器人技術和可穿戴設備)融合在一起來推動產(chǎn)生新技術要求的最終目標。在此,我們通過介紹其三個主要硬件組件(透明的軟致動器和傳感器以及迷彩皮膚)中的最新技術,并介紹了隱身的重要性,介紹了一種新型的隱身軟機器人(ISR)。一類新的應用程序,例如可秘密操作的軟機器人,輔助設備,軟機器人假肢以及人機交互可穿戴設備。同時有效地理解當前軟機器人系統(tǒng)中的優(yōu)勢和當前挑戰(zhàn)已導致對電子皮膚的現(xiàn)有技術的補充實施,并進一步朝著向軟機器人領域中的新型應用程序范式轉變發(fā)展。這些進步將包括透明軟功能材料的不斷發(fā)展,以及在傳感,驅動和偽裝皮膚整合方面的新策略,以實現(xiàn)先進的光學和機械感知性能。